Tennis has used computer vision in high-stakes officiating for over two decades. Hawk-Eye line-call technology is now standard at all four Grand Slams and most ATP and WTA tour events. Players challenge calls by name, trusting a computer vision system over a line judge's eye. Broadcasters show ball trajectory replays as routine graphics. The technology is so embedded that most viewers no longer think of it as AI — it is just how tennis works.
But behind those graphics and challenge systems are computer vision models trained on enormous volumes of annotated tennis footage. And the annotation problem in tennis is more specific and harder than it appears from the broadcast.
This guide covers how computer vision works in tennis, why tennis presents unique challenges for CV models, and what reliable tennis AI training data actually requires.
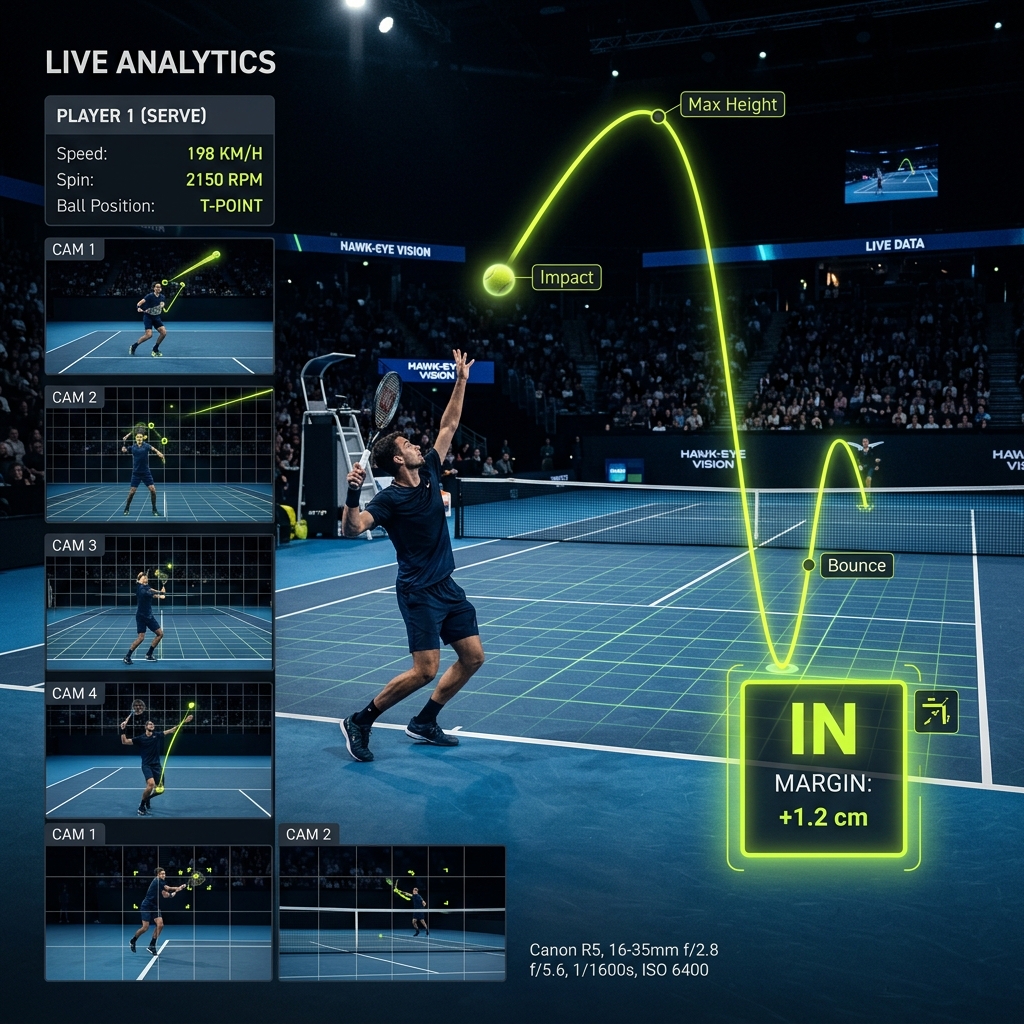 High-end technical visualization of tennis computer vision tracking: a player serving on court with multi-camera 3D trajectory lines and bounce point analytics overlays.
High-end technical visualization of tennis computer vision tracking: a player serving on court with multi-camera 3D trajectory lines and bounce point analytics overlays.
What is tennis computer vision?
Tennis computer vision is the use of AI to interpret tennis footage — tracking the ball at high speed, mapping player movement and positioning, analysing serve and stroke mechanics, supporting electronic line-call systems, and converting match video into structured data for officiating, coaching, broadcast and AI model training.
Unlike team sports, tennis has two players on a defined, enclosed court with a clearly bounded playing surface. This makes some CV problems easier — fewer bodies to track, fixed court geometry. It makes others significantly harder — the ball is smaller and faster than almost any object in sport, and the margin for error in line-call applications is measured in millimetres.
Why tennis is uniquely challenging for computer vision
Tennis sits at an unusual intersection of CV problems: extremely fast small-object tracking, millimetre-precision spatial measurement, and biomechanical analysis of highly individual movement patterns.
Ball speed and size. A professional serve reaches speeds above 230 km/h. At 50 frames per second — a standard broadcast frame rate — a ball travelling at 230 km/h covers roughly 1.3 metres per frame. The ball, approximately 6.5 centimetres in diameter, appears as a motion blur rather than a discrete sphere in most frames at service speed. The model cannot rely on detecting a clear circular object. It must infer position and trajectory from partial visual information across multiple frames simultaneously.
Sub-centimetre spatial precision for line calls. Whether a ball is in or out can be decided by less than a centimetre. The margin between an ace and a fault is sometimes visible only at pixel sub-resolution when using standard cameras. Hawk-Eye achieves its accuracy through triangulation across multiple high-speed cameras, inferring ball position at a precision that no single camera can provide independently. This multi-camera triangulation depends on precisely calibrated camera positions and a model trained to reconcile conflicting position estimates across angles.
Bounce point detection. The moment of bounce — when the ball contacts the court surface — is the legally relevant event for line-call systems. The ball's trajectory before and after the bounce follows different physics. The exact contact frame determines whether the call is in or out. At serve speed, the bounce may occur across fewer than two frames at standard frame rates. Annotating the bounce frame correctly requires judgment about trajectory physics, not just visual identification.
Individual biomechanics. Every professional tennis player has a unique serve, forehand and backhand mechanics. Unlike team sports where generalised skeletal models can approximate body position, detailed serve analysis requires models sensitive enough to distinguish a kick serve from a flat serve from a slice serve — variations that may differ by a few degrees of racket angle at contact. Training data for biomechanical models must represent a wide range of player body types and stroke patterns.
Occlusion by the net. Unlike basketball or football where occlusion is caused by other players, tennis has a structural occlusion problem: the net divides the court and regularly blocks the ball's trajectory from any single camera angle. Ball tracking through net-level crossing requires models trained to maintain trajectory continuity when the object is partially or fully hidden by a fixed structure.
The five applications of tennis computer vision
| Application | What it produces | Primary buyers |
|---|---|---|
| Electronic line calls | Ball bounce position relative to court lines | Grand Slams, tour events, governing bodies |
| Ball tracking and trajectory | Full ball flight path, speed, spin estimation | Broadcast graphics, coaching platforms |
| Player tracking and movement | Court coverage, positioning, rally patterns | Coaching tools, scouting, performance analytics |
| Serve and stroke analysis | Serve speed, direction, spin type, stroke biomechanics | Player development, coaching apps |
| Match analytics | Rally length, shot selection patterns, return positioning | Broadcast, betting, fantasy, coaching |
Each application requires different training data. Electronic line-call systems need frame-accurate bounce point labels with sub-centimetre spatial precision. Serve analysis models need dense skeletal keypoints across thousands of serve sequences from multiple players. Rally pattern analytics need shot-level event logs linked to court position coordinates.
Ball tracking in tennis: the core problem
Ball tracking in tennis is the hardest single-object tracking problem in mainstream sports computer vision. The combination of speed, size and trajectory complexity creates a detection challenge that general-purpose object detection models cannot handle without domain-specific training data.
![]() Sub-pixel tracking system analyzing a tennis ball's trajectory, velocity, and rotation in 3D court space.
Sub-pixel tracking system analyzing a tennis ball's trajectory, velocity, and rotation in 3D court space.
The blur problem
At peak serve speed, the ball is not a sphere in the frame. It is an elongated blur — a smear of yellow-green across several pixels, with uncertain centre position and edges that blend into the background. A model trained on images of stationary or slow-moving balls will not generalise to this scenario without explicit training on high-speed blur frames.
Annotating blur frames correctly requires annotators and reviewers who understand ball physics and trajectory continuity. The annotation is not "where is the ball in this frame" but "where does physics dictate the ball must be given its trajectory, and how do we represent that as a label for a model that needs to learn to predict it?"
The bounce point as a classification problem
In line-call applications, ball tracking is ultimately a classification problem: did the ball bounce inside or outside the court boundary? The raw position data from triangulation is fed into a model that classifies the ball's lateral position relative to court lines at the exact bounce frame.
This classification depends on three things being correct: the camera calibration (fixed, but must be verified per match), the ball position estimate at the bounce frame (the hardest annotation task), and the court line position in court coordinates (which can vary by sub-centimetre due to court surface conditions and camera angle).
Training a line-call model requires annotated data where the bounce frame is identified with single-frame precision and the ball's court position is verified against physical court measurements. Annotations that are off by one frame or a few pixels in position produce a model that systematically makes wrong calls at the margin — the exact calls that are challenged and scrutinised.
Spin estimation
Ball spin affects trajectory after the bounce and provides coaches with information about shot selection and execution. Estimating spin from video requires the model to analyse the ball's rotational motion — which is visible only through texture variation on the ball's surface across sequential frames at very high frame rates. Most broadcast cameras do not operate at the frame rates required for direct spin detection. Spin is typically inferred from trajectory deviation compared to a spin-free expected path. Training data for spin estimation models requires annotated trajectories with known spin values — usually calibrated from specialist high-speed cameras and mapped to standard broadcast footage.
Player tracking and movement analysis in tennis
Player tracking in tennis is simpler than in team sports — there are only two players on court, no identity confusion from identical jerseys, and limited occlusion from other players. But the use cases for player tracking in tennis are more biomechanically demanding than in most other sports.
Court coverage and positioning
Rally-level analytics track where each player is positioned at every point of contact — where they stand to receive serve, where they move after their return, how far off-court they are drawn during baseline rallies. This requires frame-accurate player position in court coordinates across entire rally sequences, with player identity maintained through player movement toward and past the net during net approaches.
Return positioning and serve-return strategy
One of the most commercially valuable analytics products in professional tennis is return positioning data — where exactly the receiver stands relative to the baseline, and how that position correlates with first-serve direction and the receiver's success rate. Building a model to extract this automatically requires training data where player foot position at return contact is annotated in court coordinates, linked to the serve direction label and the rally outcome.
Movement patterns and defensive range
Defensive range — how much court a player can cover from their base position — requires tracking player movement speed and direction across full rally sequences. Training data for movement models needs consistent player bounding boxes across the full court including the fast-movement sequences at the end of rallies when players sprint to reach wide balls. These are also the frames with the highest motion blur and the least clear image quality.
Serve analysis and biomechanics
Serve analysis is one of the most data-intensive applications of tennis computer vision, and one where the training data requirement is most specific.
What serve analysis measures
A complete serve analysis extracts: serve speed, serve direction (wide, body, T), serve type (flat, kick, slice), ball toss position and height, trophy position (racket and non-racket arm position at the peak of the toss), contact point height and lateral position, and follow-through mechanics.
Each of these measurements requires different annotation. Serve speed and direction can be derived from ball trajectory data. Serve type requires classification labels. Trophy position and contact point require dense skeletal keypoints at specific temporal frames within the serve sequence.
The challenge of individual variation
There is no single "correct" serve mechanics in tennis. Different players use different grip styles, toss positions, contact heights and swing patterns. A model trained primarily on right-handed flat servers will not generalise well to left-handed kick servers or players with unusual trophy positions. Training data for serve analysis models needs to represent the full range of professional and high-level amateur serving mechanics across both handedness, all serve types and a range of body types and heights.
Line call technology: how it works and what it requires
Electronic line-call technology is the most visible use of computer vision in tennis. Understanding how it works explains why the annotation requirements are so specific.
The triangulation approach
Systems like Hawk-Eye use between six and ten high-speed cameras positioned around the court at calibrated positions. Each camera captures ball position in 2D image coordinates. The system triangulates these 2D positions across cameras to estimate a 3D ball position in court coordinates. The bounce point is then compared to the 3D model of the court lines.
The accuracy of this system depends on camera calibration precision, the quality of ball detection in each camera view at each frame, and the model's ability to handle cases where the ball is partially or fully obscured in one or more cameras simultaneously.
What training data for line-call systems requires
Training a ball detection model for line-call applications differs from training a general sports ball tracker:
- Detection must work reliably at blur-frame conditions where the ball is not a clear sphere
- False positives — detecting non-ball objects as the ball — are more costly than in most sports CV applications, because a single wrong detection at the bounce frame produces a wrong call
- The model must handle variable lighting conditions across all Grand Slam surfaces: grass (Wimbledon), clay (Roland Garros), hard court (US Open, Australian Open) — each with different ball visibility characteristics against the surface
- Bounce frame identification must be consistent across annotators to single-frame precision
Annotating training data for line-call models requires annotators who understand ball physics and who can consistently identify the bounce frame from trajectory context, not just visual confirmation in the frame.
Who uses tennis computer vision?
Grand Slam tournaments and governing bodies use electronic line-call systems for officiating accuracy and player confidence in calls. The ITF (International Tennis Federation) and individual Slam organising bodies license or build line-call technology as a core officiating infrastructure.
ATP and WTA tour events have adopted electronic line calls widely across main draw matches, removing or supplementing human line judges. The commercial driver is officiating consistency and the reduction of player disputes.
Broadcast networks and streaming platforms use ball trajectory graphics, serve speed displays, shot landing zone visualisations and rally length statistics as standard broadcast elements. All of these require real-time or near-real-time computer vision output.
Coaching platforms and performance analytics companies build products for professional player development — serve analysis tools, movement analytics, return positioning reports and rally pattern statistics. These require larger-scale annotated training datasets than officiating systems.
Sports betting and fantasy operators consume real-time event data — serve speed, first-serve percentage, rally length, shot selection — for in-play markets and player projection models.
AI research labs use tennis footage as a benchmark for small fast-object tracking, trajectory prediction and biomechanical analysis because of the sport's controlled environment and well-defined rule structure.
What tennis computer vision training data requires
A production tennis CV dataset needs annotation that reflects the specific challenges of the sport:
For ball tracking:
- Frame-by-frame ball position including blur frames with annotated trajectory-inferred positions
- Bounce frame labels identified to single-frame precision
- Ball visibility status per frame (clear, blurred, occluded by net, occluded by player, not visible)
- Surface type labels (grass, clay, hard court) for surface-conditional models
- Multi-camera synchronisation labels for triangulation systems
For player tracking:
- Bounding boxes per player per frame across full rally sequences
- Court position coordinates (not just pixel coordinates) where applicable
- Player handedness and identity labels
- Movement phase labels (preparing, moving, at contact, recovering)
For serve and stroke analysis:
- Dense skeletal keypoints at critical serve phases (wind-up, trophy, contact, follow-through)
- Serve type classification per delivery
- Ball toss position and height relative to player body position
- Contact point position labels
- Player identity and handedness
For event and rally analytics:
- Shot-level event logs with frame-accurate shot contact timestamps
- Shot type classification (serve, return, forehand groundstroke, backhand groundstroke, volley, overhead, slice, lob)
- Shot direction (cross-court, down-the-line, middle)
- Rally outcome (winner, error, continue)
- Player position in court coordinates at contact
Frequently asked questions
What is tennis computer vision? Tennis computer vision uses AI to interpret tennis match footage — tracking the ball at high speed, mapping player movement and court positioning, supporting electronic line-call systems, and analysing serve and stroke mechanics. It powers officiating technology, broadcast graphics, coaching analytics and AI model training without requiring sensors on players or the ball.
How does ball tracking work in tennis? Tennis ball tracking uses multiple high-speed cameras positioned around the court to detect the ball in each camera's frame simultaneously. These 2D detections are triangulated into a 3D ball position in court coordinates at each frame. At peak serve speed, the ball appears as a motion blur rather than a clear sphere, so models must infer position from trajectory continuity and physics rather than direct visual detection. Training these models requires annotated footage where ball positions are labeled even in blur frames.
How does Hawk-Eye work in tennis? Hawk-Eye uses six to ten high-speed cameras positioned around the court. Computer vision models detect the ball in each camera's 2D image coordinates per frame. A 3D triangulation algorithm combines these detections into a ball position in court coordinates. The bounce point — where the ball contacts the court — is compared to a precise 3D model of the court lines to determine if the ball was in or out. The system achieves millimetre-level accuracy through the combination of multiple camera angles, precise calibration and the 3D position model.
Why is tennis ball tracking harder than in other sports? Tennis balls travel faster than almost any other object in mainstream sport — above 230 km/h on serves. At standard frame rates, the ball covers over a metre between frames and appears as a motion blur rather than a discrete object. The precision required for line-call applications is also significantly higher than in tracking applications — whether a ball is in or out can depend on less than a centimetre, requiring sub-pixel accuracy in the final classification. No other mainstream sport combines these two factors simultaneously.
What is electronic line calling in tennis? Electronic line calling is the use of computer vision systems to determine whether a ball's bounce point fell inside or outside the court boundary. The system replaces or supplements human line judges. It is now standard at all four Grand Slams and most major tour events. The challenge result — showing a three-dimensional ball trajectory and bounce point — is displayed to players and audiences when a call is disputed, though in fully electronic systems there are no challenges because the technology makes all line calls in real time.
What training data does a tennis AI model need? It depends on the model's objective. Line-call systems need frame-accurate bounce point labels with court position coordinates across varied surface types and lighting conditions. Serve analysis models need dense skeletal keypoint annotation at critical serve phases across a wide range of players, body types and serve styles. Rally analytics models need shot-level event logs with court position coordinates and outcome labels. All tennis CV models need ball tracking data that includes correctly handled blur frames — the majority of frames at serve speed.
What are the main uses of AI in tennis beyond line calls? Serve speed and direction analysis, shot selection pattern analysis, player movement and court coverage metrics, return positioning analytics, rally length and pace statistics, biomechanical serve and stroke analysis for player development, real-time broadcast graphics, automated highlight generation and in-play betting data feeds.
How is tennis computer vision different from football or basketball? Tennis has far fewer tracking objects — two players and one ball on a defined court — but requires significantly higher precision for the ball. The sub-centimetre spatial precision needed for line-call applications does not exist in football or basketball. Tennis ball speed also exceeds that of footballs and basketballs, creating more severe blur conditions at standard frame rates. The biomechanical analysis use case in tennis is also more individual-focused — serve mechanics vary significantly across players in ways that team sport models can partially generalise away.
What surfaces affect tennis computer vision performance? Yes. Ball visibility changes significantly across court surfaces. On grass at Wimbledon, the green ball against the green surface creates low contrast conditions that make detection harder. On clay at Roland Garros, the orange-red surface provides better ball contrast but clay particles scattered from the bounce create visual noise around the ball at contact. On hard courts, the blue or green surface provides the clearest detection conditions. Models trained primarily on one surface type may underperform on others, making surface-diverse training data important for general-purpose tennis CV systems.
The takeaway
Tennis computer vision has been commercially deployed longer than almost any other sport, but it remains one of the hardest CV problems to solve reliably. The ball speed, the spatial precision required for line calls, the biomechanical complexity of individual stroke mechanics, and the surface variability across the tour calendar all create annotation requirements that generic training data cannot meet.
Teams building tennis AI — whether for officiating, coaching, broadcast or betting — need training data annotated by people who understand the sport's physics and the specific precision requirements of each application.
If you are building tennis computer vision models and need expert-annotated training data — ball tracking, player tracking, serve biomechanics or event classification — see how Train Matricx works or review annotated dataset results in our case studies. We annotate a free pilot clip so you can evaluate quality before committing to any volume.
Written by
Train Matricx Team